Quadcopter learns how to fly with Reinforcement Learning
2019, Feb 01
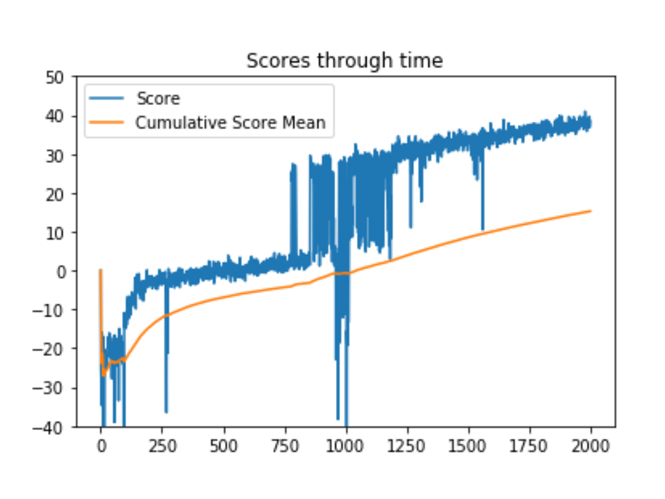
This is the fourth of 5 projects I developed as tests for the Deep Learning Nanodegree, from Udacity. Here, we apply Reinforcement Learning concepts to build a model capable of flying a drone, having its position and pose as input, and inidividual rotor speed controls as output.
You can check it in this notebook.